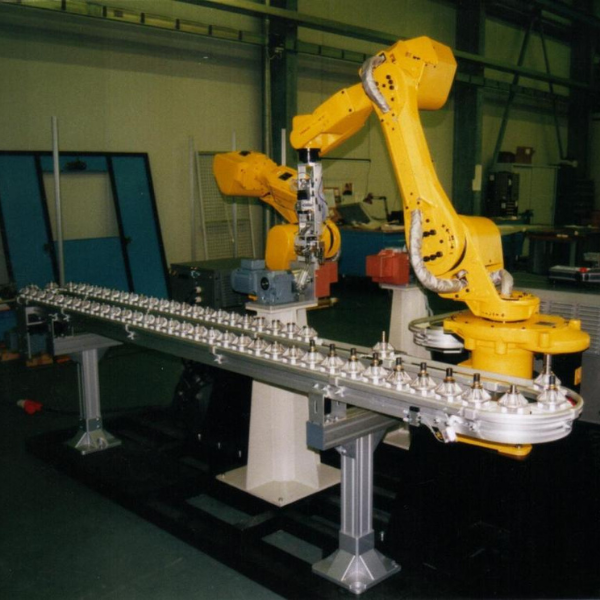
Bauteilgreifer und Saugerspinnen für automatisiertes Handling
der S+R Flexible automation technology GmbH
Robotergreifer, Vakuumgreifer und EOAT nach Maß
Bauteilgreifer und Saugerspinnen entscheiden darüber, ob automatisiertes Handling zuverlässig, schnell und bauteilschonend funktioniert. S+R FAT entwickelt kundenspezifische Greiferlösungen für Roboter, Portale und Handlingsysteme – abgestimmt auf Bauteilgeometrie, Gewicht, Oberfläche, Taktzeit und vorhandene Schnittstellen.
Ob Blechbauteil, Kunststoffteil, empfindliche Oberfläche oder schwere Baugruppe: Wir legen Greifprinzip, Sensorik, Vakuumtechnik, Greiferzangen und Schnellwechselsysteme passend zur Anwendung aus. Ziel ist ein sicherer Teilefluss mit reproduzierbarer Aufnahme, sauberer Ablage und möglichst geringer Eigenmasse am Roboter.
Typische Greiferlösungen
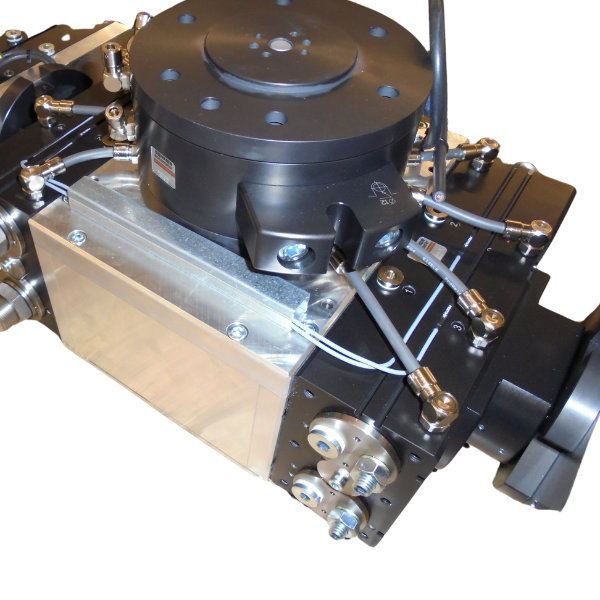
- Bauteilgreifer für Roboter – individuell konstruiert für KUKA, ABB, Fanuc, Yaskawa, Kawasaki, Nachi und weitere Systeme.
- Saugerspinnen und Vakuumgreifer – für flächige, empfindliche oder schwer mechanisch greifbare Bauteile.
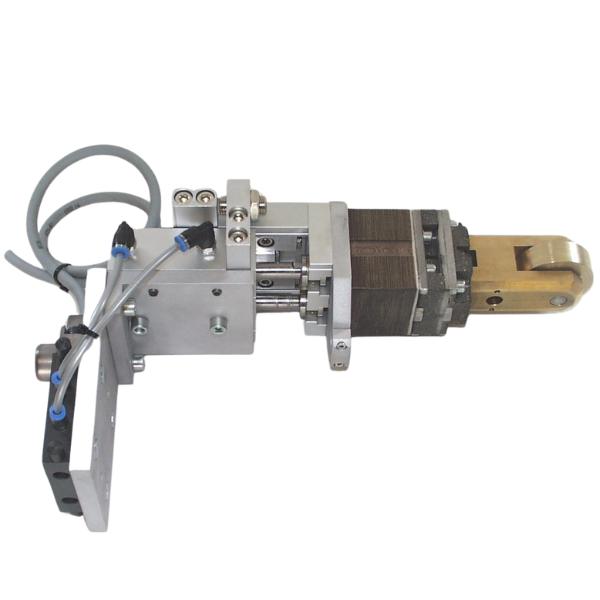
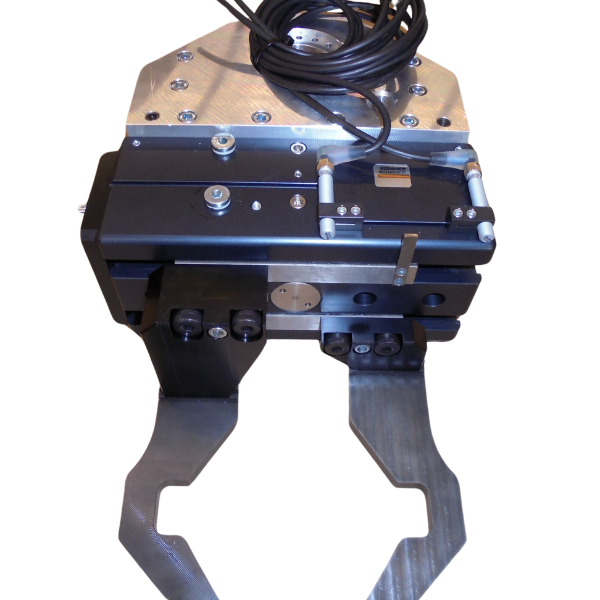
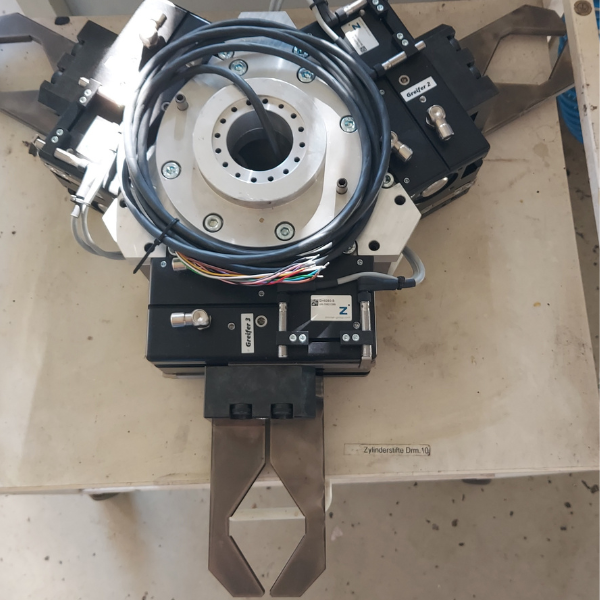
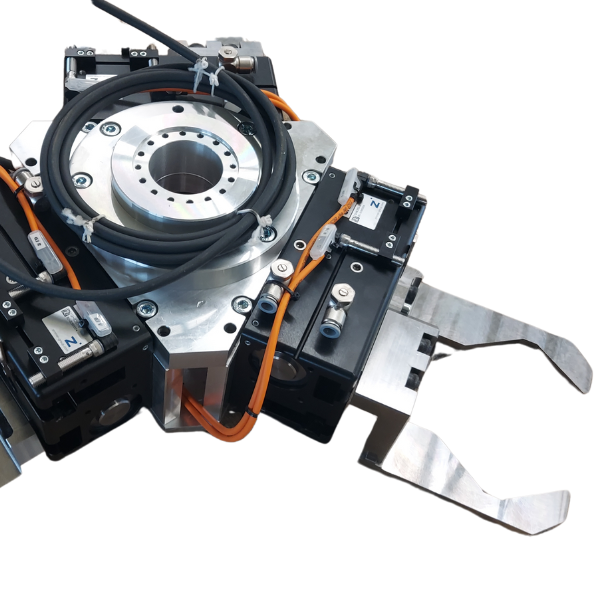
- Greiferzangen und mechanische Greifer – robust für definierte Konturen, hohe Prozesskräfte und wiederholgenaue Positionierung.
- Sensorik und Bauteilabfrage – zur Prüfung von Anwesenheit, Lage, Nest-frei-Situation und Prozesssicherheit.
- EOAT / End-of-Arm-Tooling – komplette Greifertechnik inklusive Adapter, Medienführung und Schnittstellen.
Worauf es bei Robotergreifern ankommt
Ein guter Robotergreifer ist nicht nur stabil. Er muss zum Bauteil, zum Roboter, zur Taktzeit und zum Fertigungsprozess passen. Deshalb betrachten wir Nutzlast, Störkonturen, Schwerpunkt, Greifpunkte, Sicherheitsanforderungen und Wartungszugang bereits in der Auslegung.


Welche Greiferlösung passt zu Ihrer Anwendung?
Die Auswahl hängt von Bauteilform, Oberfläche, Gewicht, Prozessumgebung und Taktzeit ab. Wir kombinieren mechanische und pneumatische Technik so, dass das Handling stabil und wartungsfreundlich bleibt.
Robotergreifer
Individuelle Greifer für Roboterzellen, Portale und automatisierte Handlingsysteme.
Saugerspinnen
Vakuumgreifer für flächige, sensible oder schwer mechanisch greifbare Bauteile.
Sensorik & Abfrage
Anwesenheit, Lage und Prozesszustand zuverlässig erkennen und rückmelden.
Ihre Vorteile mit Greifertechnik von S+R FAT:
- Prozesssicheres Handling: Bauteile zuverlässig aufnehmen, bewegen und ablegen.
- Individuelle Konstruktion: passend zu Bauteil, Roboter, Anlage und Taktzeit.
- Geringe Eigenmasse: stabile Bauweise ohne unnötige Belastung für den Roboter.
- Flexible Technologien: Vakuum, mechanische Greifer, Greiferzangen, Sensorik und Schnellwechsel.
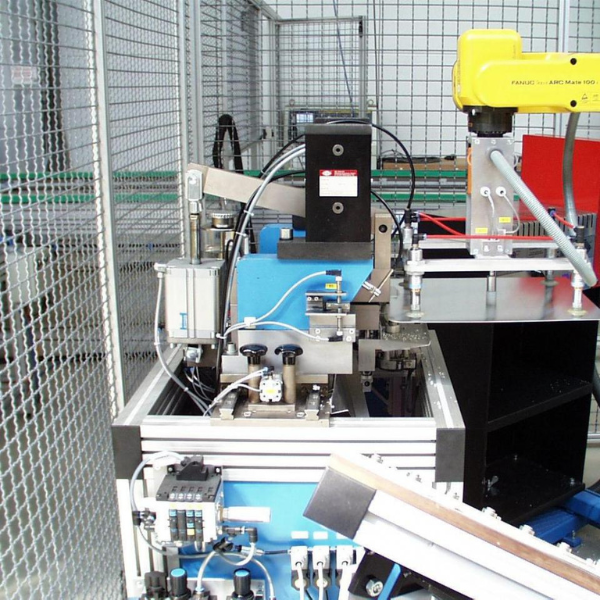
- Praxisnahe Integration: abgestimmt auf bestehende Vorrichtungen, Roboterzellen und Automatisierungslinien.
Häufige Fragen
Für welche Roboterhersteller baut S+R FAT Greifer?
Wir entwickeln Greiferlösungen unter anderem für KUKA, ABB, Fanuc, Yaskawa, Kawasaki und Nachi. Entscheidend sind Schnittstelle, Nutzlast, Bewegungsraum und Bauteilanforderung.
Wann ist eine Saugerspinne sinnvoll?
Saugerspinnen eignen sich besonders für flächige oder empfindliche Bauteile, bei denen mechanisches Greifen Spuren hinterlassen oder konstruktiv aufwendiger sein kann.
Kann ein Greifer an eine bestehende Anlage angepasst werden?
Ja. Wir prüfen vorhandene Roboter, Vorrichtungen und Schnittstellen und entwickeln daraus eine passende Greifer- oder EOAT-Lösung.
Bauteilgreifer oder Saugerspinne anfragen?
Schicken Sie uns Bauteildaten, Roboterhersteller und gewünschte Taktzeit. Wir prüfen, welche Greiferlösung für Ihre Anwendung technisch und wirtschaftlich sinnvoll ist.